I currently work in the Ni Lab at UT Dallas as an undergraduate researcher. Our research centers around soft robotics and programmable soft materials, fields which have far-reaching applications in biomedicine, space and ocean exploration, and much more.
Designing soft robots is challenging because it carries a number of challenges that are not found in typical robotic systems. In particular, soft robots are difficult to control because of their implicitly flexible nature. Controlling soft robots requires the development of a new kind of 'smart' materials, which can adapt their shape and physical properties to new and changing environments.
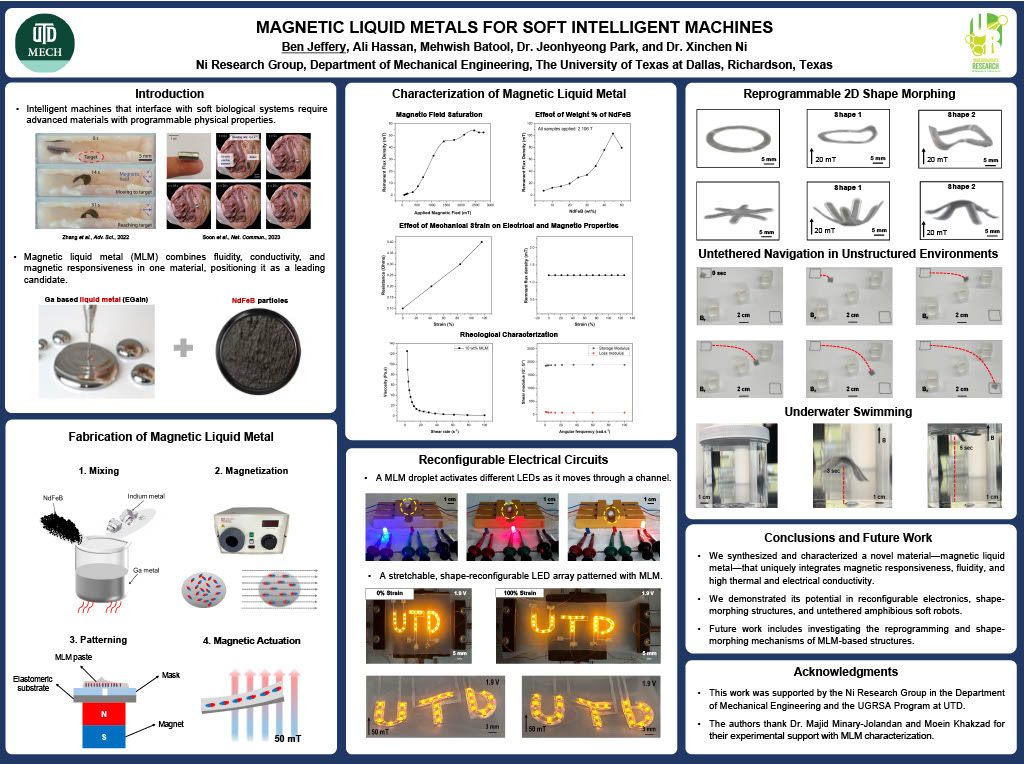
In the lab, I'm currently working on integrating magnetic liquid metals (MLMs) into soft robots, which allows for them to be actuated without tethering. I'm investigating various different liquid metals and magnetic particles and working on testing their thermal, mechanical, electrical, and magnetic properties to see which may be the best match for future robotic development. I've worked on designing flexible electronic circuits, controlling nanorobots through enclosed spaces, and reprogramming shape-morphing structures via magnetic fields.
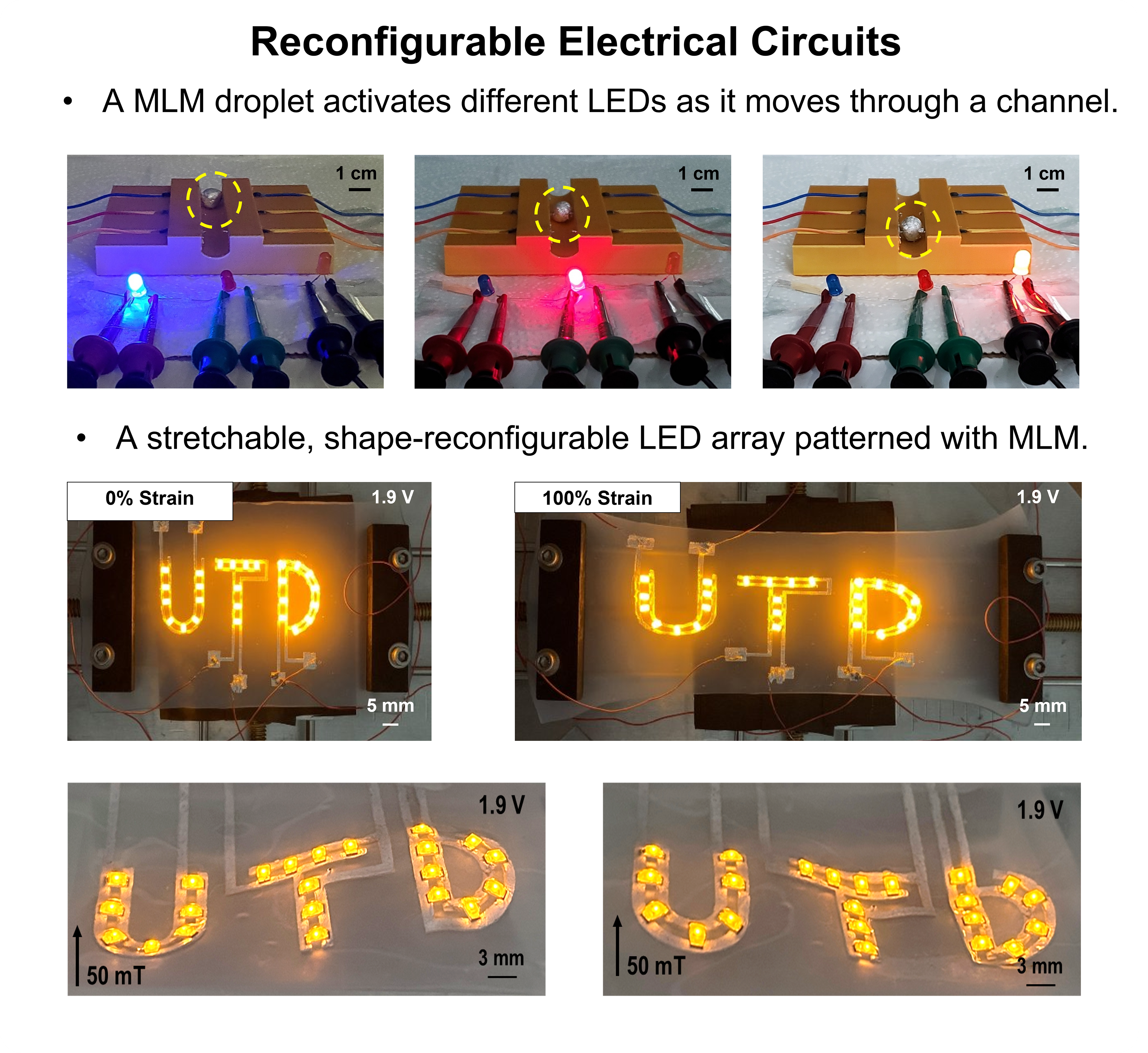
Examples of some of my projects: Activation of electronic circuits using Magnetic Liquid Metals and shape-morphing electronic circuits that can operate under high strain rates.
In recognition of my work, UTD awarded me the 2025 Undergraduate Research Scholar Award, a grant which enable me to continue to work in this field and to present my work at the end of the academic year. I'm super grateful to my PI, Dr. Xinchen Ni, and to UT Dallas for the opportunity to do such exciting work! My final poster can be seen below.

The lab group during our inaugural dinner, August 2024
Below you'll find a copy of my final poster which I presented at the UT Dallas Undergraduate Research Scholar Awards in April 2025.